
CGEM Onstep Retrofit
In 2019, in an attempt to improve the autoguiding performance of my german equatorial mount, I went through the process of retrofitting my Celestron CGEM to OnStep Telescope Mount Goto Controller.
Components
Hypertuned CGEM
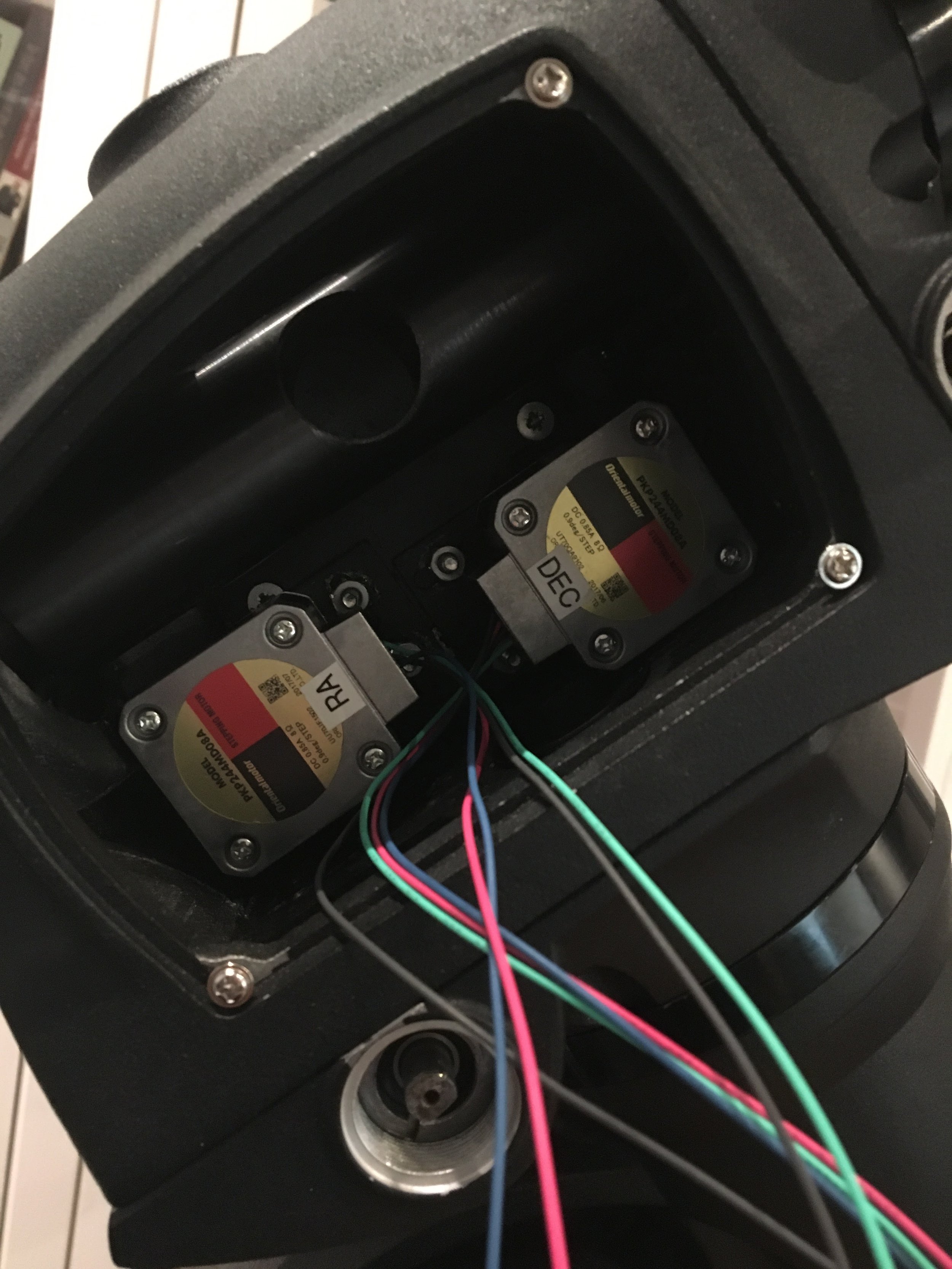
Oriental Stepper Motors (PKP244MD08A-L) – Nema 17 – 400 steps per turn
Timing belt and pulleys (beltingonline.com)
Belts
2 ea. MP (MXL) Synchroflex® Timing Belts
Width in mm – 6
Belt Length in mm – 182.88
Tension Cords – Steel
Material – Standard PU
Pulleys
2 ea.15 Tooth MXL Pulley (AL15MXL025FB)
Bore – 5mm
Grubscrew Holes – 2 off M
2 ea.60 Tooth MXL Pulley (AL60MXL025)
Bore – 12mm
Grubscrew Holes – 2 off M4
Onstep MiniPCB 2
MCU: Teensy 3.2
Motor Controllers: TMC2130
Design
My goal was to validate if the stock CGEM could potentially have better tracking and guiding performance by replacing motors/gearbox, spur gears, electronics & firmware.
Using 400 steps stepper motors with the CGEM 1:180 worm gear and 1:4 pulleys, I calculated a 0.281 arcseconds tracking resolution using 16 micro-stepping.
No modifications were made to the CGEM assembly. I had to fabricate a plate for the motors to replace to stock plates



Fabrication & Assembly
The CGEM had to be disassembled in order to install the pulley to the worm gear. I had experience with the mount due to the fact that I had hypertuned it myself.
No modifications were made to the CGEM assembly. I had to fabricate a plate for the motors to replace to stock plates. Also bought a USB endoscope in order to be able to make the belts/pulleys alignment once the motors were in the mount.










Results
Results are shown significant improvements. PHD2 Autoguiding results:

Original Hypertuned CGEM = Peak to peak guiding graph of -4 to +4 arc-second with an RMS of near 2 arc-second.
With the replaced parts = Peak to peak guiding graph of -1 to +1 arc-second with an RMS of near 0.7 arc-second.
“No more elongated stars”